La piel que cambia de textura permite que el robot exprese sus sentimientos




Publicado el 30 de julio de 2018

Producto del Laboratorio de Colaboración y Compañerismo Humano-Robot de la universidad, el robot prototipo tiene una "piel" externa suave que exhibe diferentes texturas dependiendo de lo que quiere decirle a la persona que interactúa con ella.
"Se podría pensar que los robots son una de esas" otras especies ", no tratando de copiar lo que hacemos, sino interactuando con nosotros con su propio lenguaje, aprovechando nuestros propios instintos".
Los ingenieros se inspiraron para crear la piel en base a sus observaciones de cómo los humanos interactúan con otras especies animales, leyendo señales visuales y hápticas para obtener información sobre el estado mental de la criatura.
El equipo diseñó la piel elástica del robot para cambiar la textura cuando se bombea aire dentro de las cavidades elásticas incrustadas debajo de la superficie del material.
Historia relacionada El robot ciego Cheetah 3 de MIT puede navegar sin sensores o cámaras
"Tenemos muchas relaciones interesantes con otras especies", dijo Guy Hoffman, profesor asistente de la Escuela Sibley de Ingeniería Mecánica y Aeroespacial de Cornell, quien dirigió a los estudiantes en el Laboratorio de Colaboración y Compañerismo Humano-Robot.
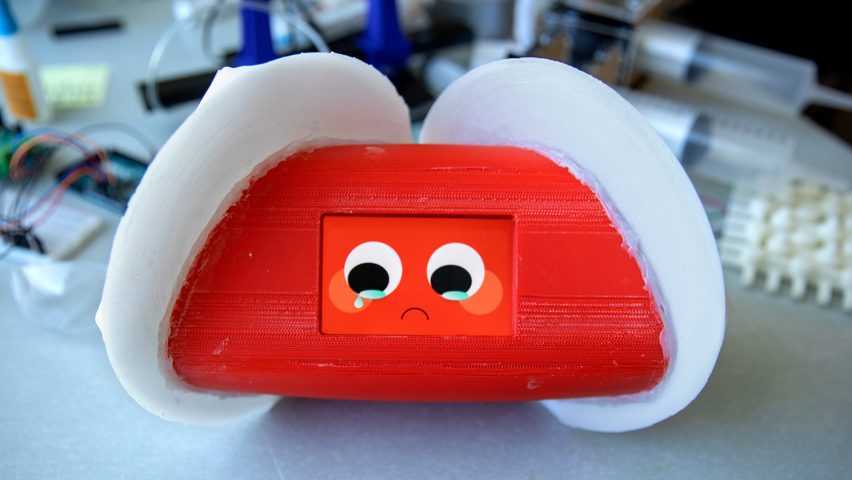
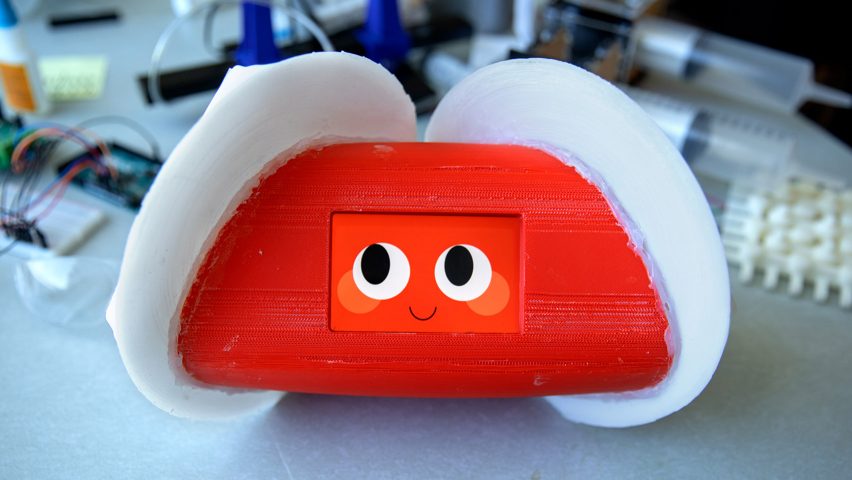
El mensaje se enfatiza mediante una pantalla que muestra la expresión correspondiente en una cara animada.
Su investigación también tiene relevancia para el campo más amplio de la robótica, donde la psicología de los usuarios es una consideración clave, sobre todo porque las inteligencias artificiales aparecen en más áreas de la vida de las personas.
Diseño: Yuhan Hu, Zhengnan Zhao, Abheek Vimal y Guy Hoffman
El proyecto del robot transformador de la Universidad de Cornell combina la investigación psicológica actual con otro campo científico que observa un progreso rápido: materiales activos. Estos son materiales que cambian de forma a medida, generalmente en respuesta a cambios de temperatura o presión, como Liquid Printed Pneumatics y Active Auxetic de MIT.
El Laboratorio de Colaboración y Compañerismo de Humano-Robot se enfoca en robots sociales como Aibo y Paro cuyo propósito principal es interactuar con los humanos. El equipo quería expandir las formas en que estas máquinas se pueden comunicar con las personas que las rodean.
Un ejemplo son los autos sin conductor: lograr que los humanos confíen en uno lo suficiente como para montarlos es un desafío clave, como el director de la junta de BMW Peter Schwarzenbauer discutió con Dezeen el año pasado.
Entonces, cuando la piel en la espalda de un perro se eleva, por ejemplo, inferimos que se sienten amenazados o emocionados.
La piel expresiva se compone de múltiples hojas de estos bolsillos de aire, lo que permite generar muchas texturas en varios patrones. Para imitar los comportamientos de los animales, los ingenieros eligieron la piel de gallina y los picos para el prototipo.
"Por el momento, la mayoría de los robots sociales expresan [su] estado interno solo mediante el uso de expresiones faciales y gestos", escribió el equipo en un documento presentado en abril en la Conferencia Internacional sobre Robótica Suave en Livorno, Italia.
Hoffman y su equipo utilizaron un diseño de material activo desarrollado por un colega de MAE, Rob Shepherd, que dirige el Laboratorio de Robótica Orgánica de la escuela.

Los ingenieros de la Universidad de Cornell han creado un robot que se pone la piel de gallina o se pone puntiagudo para comunicar su estado interno.
Variando la frecuencia o el nivel de presión de aire produce diferentes efectos. Un video producido por la Universidad de Cornell muestra al robot pulsando con una exagerada piel de gallina cuando está "feliz" y disparando picos a un ritmo rápido cuando está "enojado". Un patrón más lento y más sinuoso emerge cuando el robot está "triste".
"Creemos que la integración de una piel que cambia la textura, combinando ambas modalidades táctiles y visuales, puede mejorar significativamente el espectro expresivo de los robots para la interacción social".
Créditos del proyecto: